Predictive Tracking vs. Reactive Tracking Explained
Discover how predictive tracking outperforms reactive tracking by estimating kinematics and managing uncertainty. Learn why traditional methods fail in high-dynamic scenarios and how SpearX's innov...
6/18/20261 min read
Main : Detection ≠ Tracking
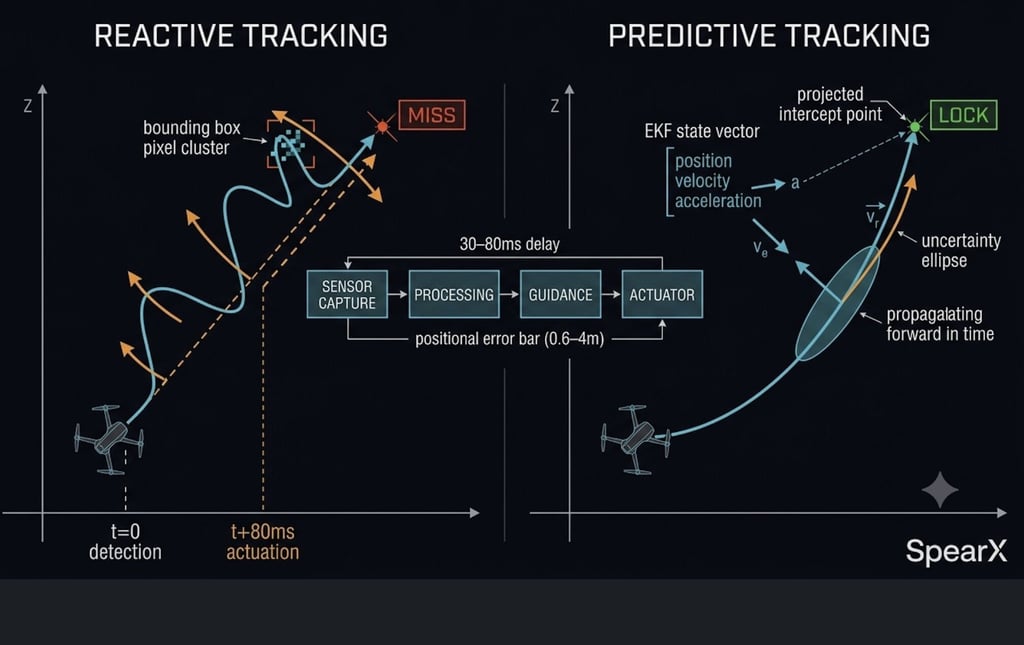
Detection gives a bounding box. Tracking gives a kinematic state: position, velocity, acceleration, and uncertainty bounds. The guidance loop consumes state, not pixels.
Why Predictive Tracking Beats Reactive Tracking (3–5x Better) ?
We don't chase the current pixel cluster.
We estimate kinematics, propagate uncertainty, and guide toward the future intercept point.
The Latency Trap:
Break down the delay chain: Sensor capture → Processing → Guidance computation → Actuator response.
In real systems, this is 30–80ms. At relative speeds of 20–50 m/s, that's 0.6–4 meters of positional error.
Reactive guidance guarantees oscillations or a miss. Predictive guidance solves it.
How we close the gap at SpearX :
1. Predictive State Estimation
We don't filter to "now." We filter to the actuation horizon. EKF/UKF stacks output predicted state at `t + latency`, not `t = 0`. The system manages the future, not the past.
2. Continuous Path Regulator (CPR) vs. PID
Traditional PID corrects position OR velocity, causing oscillations when the target turns. CPR calculates a parabolic correction that aligns position AND velocity simultaneously at each control interval. Errors don't propagate; they're mathematically reset. The vehicle stays on time, on position, on velocity.
3. Uncertainty Propagation
Confidence bounds travel with the track. When prediction uncertainty crosses a threshold, the guidance shifts from aggressive pursuit to conservative maintenance. No guessing. No overshoot. Just controlled behavior.
Naked Truth:
You can't eliminate latency. You can only design around it.
Predictive estimation + bounded control + uncertainty propagation = persistent lock in real-world conditions.
Stop Chasing Pixels! Your Target Already Left!
Many teams treat tracking as a computer vision task: draw a box, follow the pixels, adjust gains.
But in high-dynamic scenarios or contested environments, this approach breaks fast.
Why?
Because targets maneuver. Sensors drift. Latency exists. And "where the target is now" is already old news by the time your actuators respond.
At SpearX, we treat target following as a state estimation problem, not just detection.
Related : GEOCOM Co. LLC www.geocomco.eu DeepTechRnD www.deeptechrnd.eu SpearXAgro www.spearxagro.eu
Contacts
SpearX ↑ Strike with Precision
+359 877 620 210
D-U-N-S® 525540791


© 2025 - 2026. All rights reserved. SpearX Projects. Geocom Co. LLC





SpearX is an EU-Ukrainian company located in a strategic areas for R&D in UAV