Stop Trusting Your UAV Simulator - The Hard Truth
Discover why relying on UAV simulators can lead to failures in real-world applications. Learn about the critical factors like sensor drift and hardware-in-the-loop testing that can bridge the gap b...
6/17/20262 min read

1. Domain Randomization + Real-Data Feedback Loop
Every simulation run has different parameters: wind gust intensity ±3σ, sensor SNR variation, latency jitter, battery decay factor. Then we feed field telemetry back into the simulator. The model learns from reality.
2. Hardware-in-the-Loop (HIL) with Fault Injection
Real flight controller talks to virtual sensors. We inject GPS spoofing, packet loss bursts, sensor freeze - before the first flight. Nothing moves physically, but everything breaks safely.
3. Continuous Path Regulator (CPR)
Unlike PID loops that correct position OR velocity, CPR calculates a parabolic trajectory that corrects BOTH simultaneously at each control interval. When wind pushes you off course, you don't just steer back - you adjust velocity profile so you arrive on time AND on position. Errors don't propagate; they're mathematically reset at each interval.
4. 4D Avoidance Limit + Control Barrier Functions
Not "please stay within bounds" but "you physically cannot violate constraints." The avoidance limit is a time-varying sphere around your trajectory where you can maneuver safely. CBFs project any unsafe action back into the safe set. It's not software checking - it's mathematics enforcing.
5. Continuous Calibration
Covariance matrices adapt to real-time noise levels. When sensor confidence drops below 0.6, the system degrades gracefully: reduces speed, increases separation, requests human oversight. Not catastrophic failure - controlled degradation.
The Hard Truth:
Sim-to-real isn't a validation step. It's a continuous learning cycle.
Simulate → Test → Learn → Improve Sim → Repeat
If your simulator isn't learning from field data, you're not closing the gap. You're just hoping it disappears.
At SpearX, after each field test, we feed vibration spectra, latency profiles, wear metrics, and calibration offsets back into the digital twin. Next simulation is more realistic. The gap shrinks.
Perfect models in imperfect simulators create fragile systems.
Imperfect models in learning simulators create robust systems.
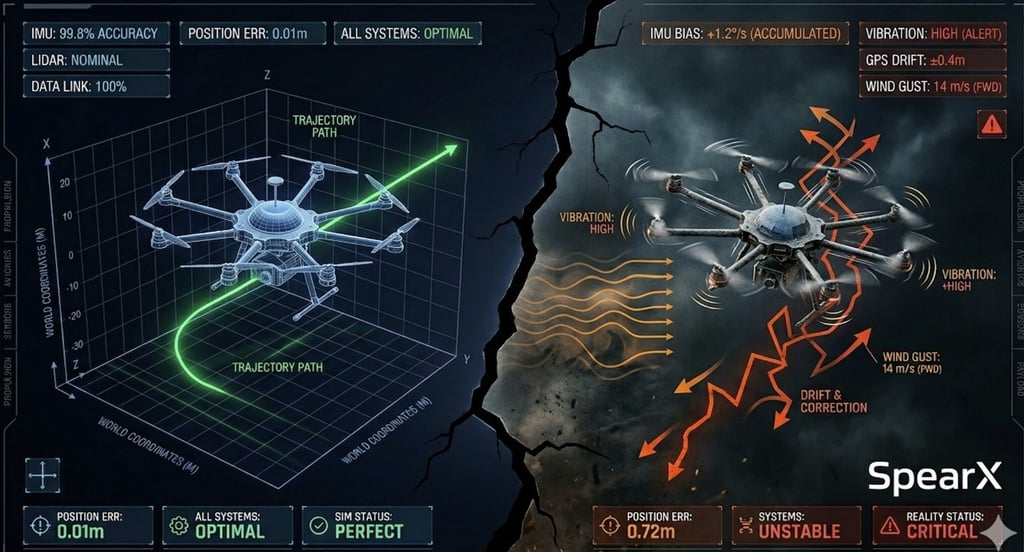
Truth: Your algorithm's 99% accuracy in simulation means nothing if it crashes after XX seconds in the field. its reality!
Here's what your simulator doesn't know (but reality does):
- UAV Frame resonance - vibrations that destroy optical flow after 90 seconds of flight
- Sensor drift - IMU bias accumulation that shifts your position estimate by 2.3 meters after 2 hours
- Communication latency
- Mechanical backlash
- Environmental chaos
90% of algorithms work perfectly in sim. 90% of those fail in the field.
Not because the code is bad.
Because the model is incomplete & how we close the gap at SpearX - see below:
Related : GEOCOM Co. LLC www.geocomco.eu DeepTechRnD www.deeptechrnd.eu SpearXAgro www.spearxagro.eu
Contacts
SpearX ↑ Strike with Precision
+359 877 620 210
D-U-N-S® 525540791


© 2025 - 2026. All rights reserved. SpearX Projects. Geocom Co. LLC





SpearX is an EU-Ukrainian company located in a strategic areas for R&D in UAV