Optical Payload Architecture in C-UAS
3/30/20262 min read


In a multi-sensor CUAS architecture, Radar and RF provide initial cueing, but the EO/IR payload serves as the critical verification layer.
The challenge isn't just detection-it's optimizing spectral bands, detector physics, and processing latency to minimize False Alarm Rates (FAR) while maintaining positive identification.
Spectral Band Selection & Detector Physics
VIS (0.4-0.7 µm)
Detector: High-resolution CMOS/CCD
Use Case: Daylight ID, forensic evidence, visual tracking
Limitation: Atmospheric (fog, smoke), low SNR in low-light
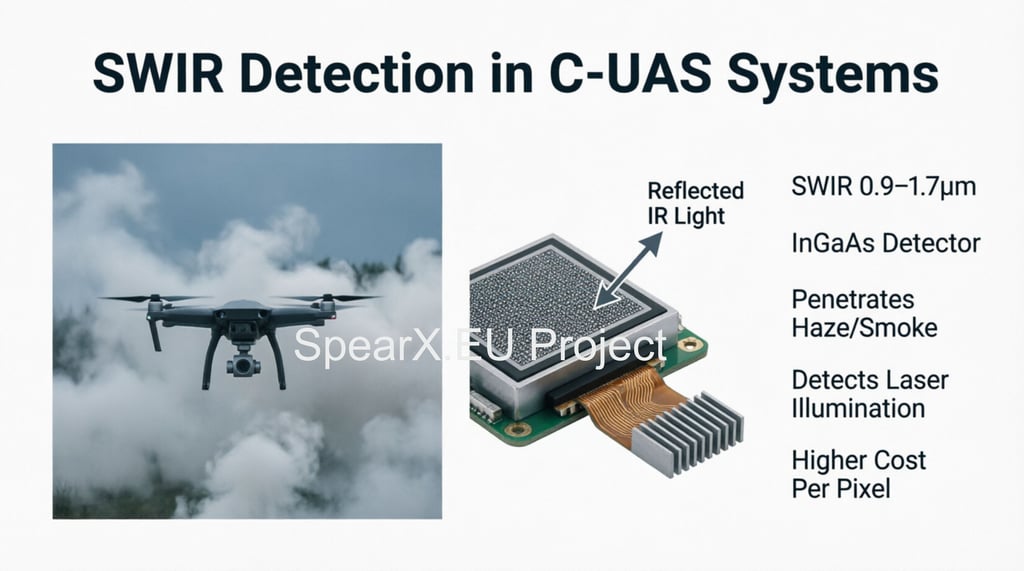



SWIR (0.9-1.7 µm)
Detector: InGaAs
Advantage: Penetrates haze/smoke; detects reflected IR and laser illumination
Use Case: All-weather cueing, laser spot detection
MWIR (3-5 µm)
Detector: Cooled MCT or InSb
Advantage: Superior atmospheric transmission vs. LWIR; higher sensitivity to hot exhaust
Use Case: Long-range detection, maritime/high-altitude scenarios
Constraint: Requires cryogenic cooling; higher SWaP-C
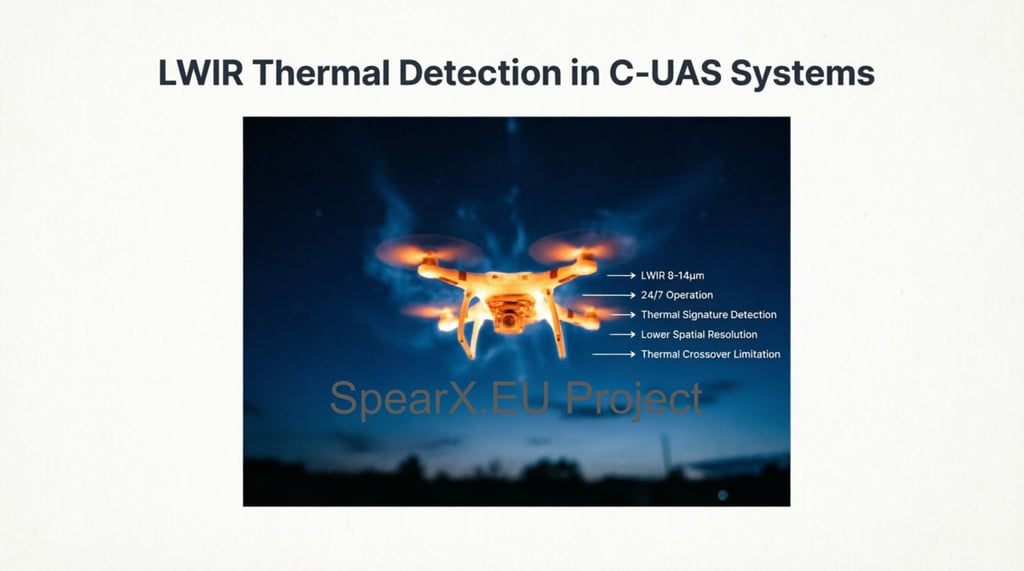
LWIR (8-14 µm)
Detector: Uncooled Microbolometers (VOx/a-Si) vs. Cooled MCT
Metric: NETD <40mK required for small UAS at range
Use Case: 24/7 operation, RF-silent autonomous drone detection
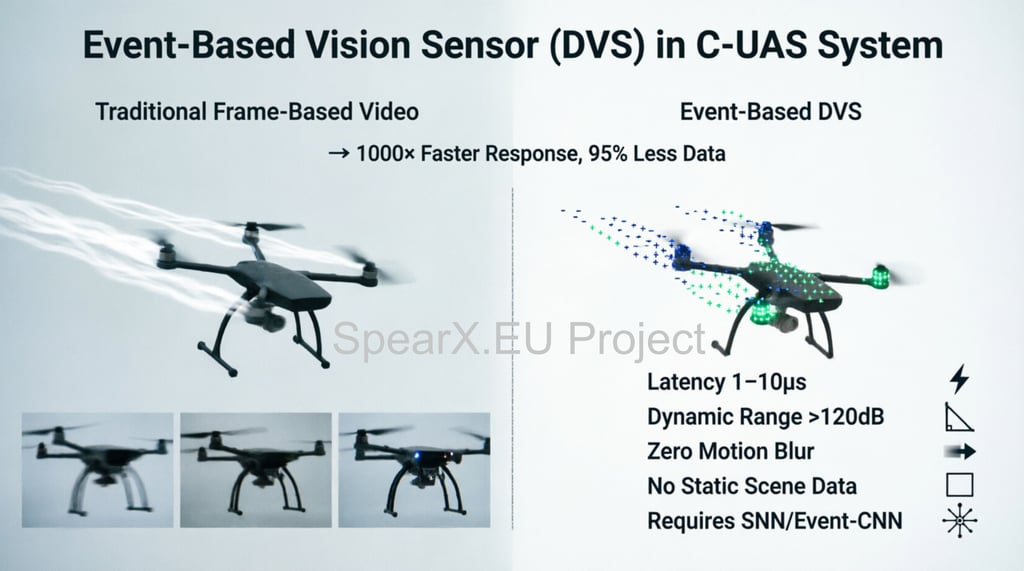
Event-Based Sensors (DVS)
Principle: Asynchronous pixel output on brightness change only
Metrics: Latency 1–10 µs, DR >120 dB, zero motion blur
Use Case: Ultra-fast transient detection, extreme HDR scenes
Constraint: No static scene data; requires SNN/event-CNN pipelines
System Integration & SWaP-C
Multi-spectral deployment introduces significant trade-offs:
• Stabilization: High-precision gimbos for LoS stability
• Latency: Sensor-to-processing <50ms for effective tracking
• Edge Processing: CNNs/SNNs on EdgeAI reduce bandwidth but increase thermal load
Algorithmic Fusion & Cueing:
Workflow: Cue → Slew → Verify
Cue: Radar/RF provides azimuth/elevation
Slew: Gimbal positions payload to ROI
Verify: AI classifier analyzes feed
Decision: Correlate optical signature with RF fingerprint
Critical: 1° radar error @ 2km = 35m offset-can miss target in narrow FOV.
Design Priorities for Architects:
✅ Prioritize NETD over Resolution for IR channels-thermal contrast drives range
✅ Optimize FOV Switching: Wide for acquisition, narrow for ID
✅ Engineer for False Alarms: Tune AI thresholds for environmental context
✅ Plan for Data Fusion: Sync timestamps and coordinates across all sensors
Conclusion:
Effective optical detection in CUAS like SpearX is about selecting the right spectral combination for the threat profile and integrating it into a low-latency fusion loop.
Related : GEOCOM Co. LLC www.geocomco.eu DeepTechRnD www.deeptechrnd.eu SpearXAgro www.spearxagro.eu
Contacts
SpearX ↑ Strike with Precision
+359 877 620 210
D-U-N-S® 525540791


© 2025 - 2026. All rights reserved. SpearX Projects. Geocom Co. LLC





SpearX is an EU-Ukrainian company located in a strategic areas for R&D in UAV