Evolution of Guidance Systems: 1950s to 2020s
Explore the evolution of guidance systems from the analog era of the 1950s to the digital transition and beyond. Discover how target tracking technologies have advanced, including the introduction ...
5/4/20261 min read
Visual seekers did not just get "better cameras."
They changed how machines see, predict, and act. Here is a fact-checked technical timeline:
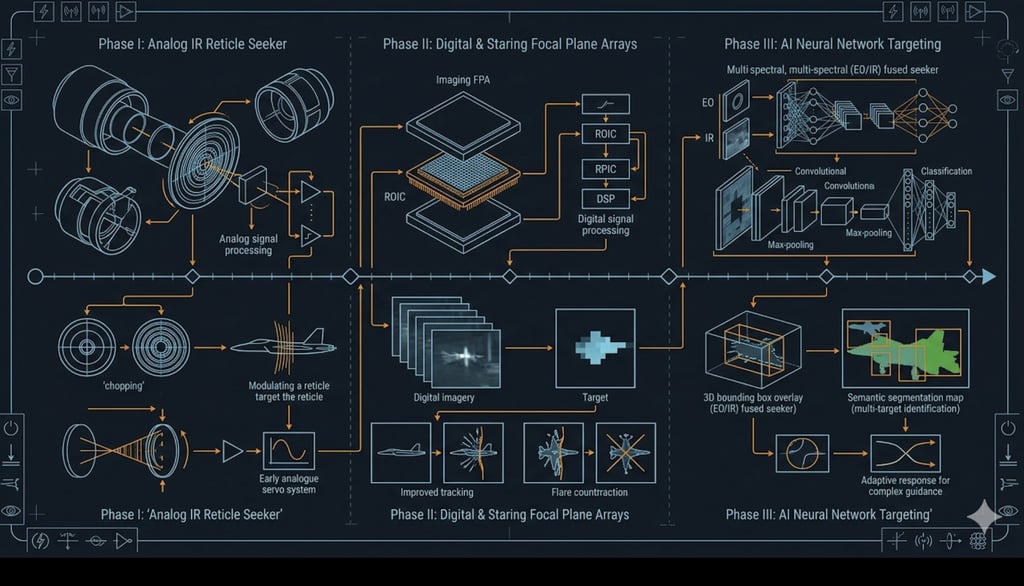
1950s–1960s: The Analog Era
First operational IR seekers emerged mid-1950s with PbS (lead sulfide) detectors and spinning reticles. They tracked only the brightest/hottest point-no classification, just "chase the spot."
Examples: AIM-9B Sidewinder (1956, first operational IR missile), AIM-9D/G (1960s variants), AGM-62 Walleye (1966, TV-guided bomb, not IR).
1970s–1980s: Digital Transition
CCD sensors and early processors enabled digital correlation tracking. Systems stored target templates and tracked shapes, not just heat. Cooled IR (cryogenic MCT detectors) improved sensitivity.
Examples: AGM-65A Maverick (1972, EO variant), AIM-9L (1977, first all-aspect IR), AIM-9M (1982, better flare resistance), AGM-65D (1983, IR Maverick).
1990s–2000s: DSP & Predictive Tracking
Digital Signal Processors enabled real-time Kalman filtering and edge detection. Uncooled microbolometers replaced heavy cryogenic IR. Adaptive thresholds handled smoke/partial occlusion.
Examples: Storm Shadow/SCALP (2002-2003, IIR terminal guidance), Spike ER/MR (1990s-2000s, EO/IR + fiber link), Brimstone (2005, mmWave radar + semi-active laser + IIR).
2010s–2020s: Edge AI & Neural Networks
FPGA/NPU chips brought CNNs to the edge for real-time detection, classification, and segmentation. Feature-level multi-sensor fusion. Total loop latency <50ms under strict SWaP constraints.
Examples: AIM-9X Block II (2015, high off-boresight + JHMCS helmet cueing), Switchblade 600 (2010s, loitering munition with EO/IR), Lancet (2019+, AI-assisted terminal guidance), SPIKE NLOS (2010s, AI tracking in heavy jamming).
2020s & Beyond: What's Next?
Event-based cameras (microsecond response, zero motion blur), neuromorphic chips, uncooled SWIR/MWIR detectors (QWIP, T2SL), self-supervised learning for field adaptation. Quantum IR sensors for ultimate sensitivity.
Key Takeaway
Guidance systems evolved from "chasing a bright pixel" to "understanding the full scene." Core challenges remain: latency, noise, power, size. We solve them with neural architectures and hardware co-design instead of analog circuits.
From our experience in SpearX:
Working on EO/IR systems for UAVs, the bottleneck is rarely the sensor itself. It's integration-multi-spectral sync, deterministic edge inference, and keeping the full loop <50ms in field conditions. Optimize one part, system still fails.
Balance is everything.
Related : GEOCOM Co. LLC www.geocomco.eu DeepTechRnD www.deeptechrnd.eu SpearXAgro www.spearxagro.eu
Contacts
SpearX ↑ Strike with Precision
+359 877 620 210
D-U-N-S® 525540791


© 2025 - 2026. All rights reserved. SpearX Projects. Geocom Co. LLC





SpearX is an EU-Ukrainian company located in a strategic areas for R&D in UAV